



展示の概要
ロボットたちとのふれあいや、最新ロボティクス研究の紹介を通して、未来の多様なロボットとのくらしを想像する展示です。
人とのコミュニケーションやセラピーを目的に開発されたロボットの展示ブースでは、触ったり、声をかけたりしながら、ロボットとのふれあいを楽しむことができます。最新ロボティクス研究の紹介ブースでは、内容を定期的に更新することで、常に最新の研究や注目のロボットを展示します。「こんなロボットもあるんだ!」と、来館者がそれまで持っていたロボットのイメージが変わるような研究を、実物を通して幅広く紹介します。多様なロボットたちとの出会いを通して、未来の人とロボットの関わりを想像してみましょう。
- 体験できる場所
- 3階(未来をつくる)



展示ロボット紹介
ケパラン
あなたとかかわり、変わっていくパートナーロボット

パロ
人に楽しみや安らぎを与え、心をケアするセラピー用ロボット

本物の動物を飼うことが難しい場所や人のために開発されたロボットです。
セラピーロボットとして医療施設のほか、国際連合機関などにより、災害や戦争を体験した人などに対して心のケアに活用されています。また、有人火星探査に向けて、狭い居住空間でのストレス軽減の効果についても実験が行われています。
協力
柴田 崇徳(国立研究開発法人 産業技術総合研究所 上級主任研究員)
株式会社知能システム
aibo(アイボ)
人に寄り添い、愛情の対象となるエンタテインメントロボット

aiboは家庭の中で人とつながりを持ち、育てる喜びや愛情の対象となることを目指して開発されたロボットです。自ら好奇心を持ち、人に寄り添いながら毎日を共に楽しく生活し、成長していくパートナーとなることを目指しています。
日々ふれあいを重ねていくことで aiboの性格やふるまいが変化し、個性も生まれてきます。また、クラウドにつながることで、aibo全体での学習もおこない、成長していきます。
協力
ソニーグループ株式会社
LOVOT(ラボット)
心が通う、あたたかいテクノロジー

だんだん家族になっていくロボット「LOVOT」。柔らかくて温かいからだ、10億通り以上ある目や声の組み合わせ、思わず抱きしめたくなるような肌触りなど、人がLOVOTに愛着を形成するための技術が凝縮されています。
頭部の「センサーホーン」には、半天球カメラ、マイク、照度センサー、サーモグラフィーが内蔵されています。全身の50を超えるセンサーで捉えた刺激を機械学習技術で処理し、リアルタイムに動きを生みだします。
協力
GROOVE X 株式会社
展示研究紹介
自然な動きのメカニズム
人の足のように動くロボットのヒミツ
重力を含めた周りの環境を利用しながら機械が歩き続ける現象を「受動歩行」といいます。通常、ロボットに安定して2足歩行をさせるには、たくさんの制御が必要ですが、受動歩行の考えをロボットに取り入れると振り子の動きやバネの力といったシンプルなメカニズムで、自然に歩かせられるようになります。
構造がシンプルなため、使用者の負担が少ない歩行支援技術や、少ないエネルギーで動くロボットの開発など、さまざまな応用が可能です。
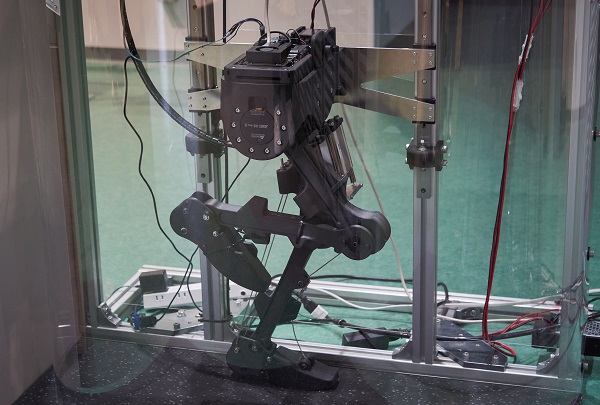
けんけんロボット
人の身体をベースにした構造を持つ2足ロボットです。
ロボットが鏡に映った自分の動きから跳び方を学習することで、リズミカルでスムーズな片足跳びができます。
20年にわたる受動歩行の研究をもとに設計されたロボットの構造と、それを巧みに活かして制御するAIが組み合わさることで、人のような自然な動きを可能にしています。
協力
佐野 明人(名古屋工業大学 工学研究科 教授)
上村 知也(名古屋工業大学 工学研究科 助教)
〈弱いロボット〉たちと共に生きる
「弱さ」が持っている可能性
自分ではゴミを拾えないゴミ箱ロボット。昔話を語りながら途中で忘れてしまうロボット。これらは一人では目的を達成できない〈弱いロボット〉たちです。しかし、これらの〈弱いロボット〉が近くにいると、人はごみを拾ってあげたり忘れた言葉を教えてあげたり、つい手助けしてしまいます。人との関わりの中で行動や会話を引き出す「ちから」を持つロボットたちを見ていると、他者と支えあう関係性について改めて考えさせられます。
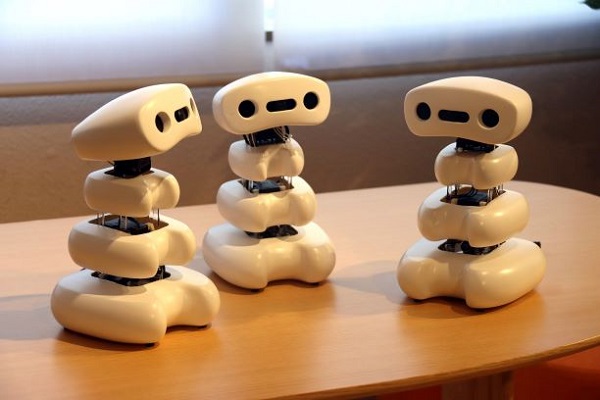
トーキング・ボーンズ
何気なく発した言葉に反応して、〈トーキング・ボーンズ〉たちが今日あったできごとや経験に対する関心や共感を示しながら、会話を引き出してくれます。語りかけに対してさらに聞き返してくれることで、「もっと話したい」と感じたり、安心感や嬉しさを感じることができるかもしれません。
協力
豊橋技術科学大学 ICD-LAB(代表:岡田 美智男 教授)
やわらかい、かたい、やわらかい……
自由自在な「柔らかさ」
限られた状況だけに対処できる従来のロボットに対して、さまざまな環境や物体に対して柔軟に対応することができる「柔らかさ」を持つ「ソフトロボット」が注目されています。しかしいつも柔らかければよいというわけではなく、状況に応じて「柔らかさ/かたさ」を自在に変えられることは、ものをつかんだり動かしたりとロボットが実際に機能するためになくてはならないものです。
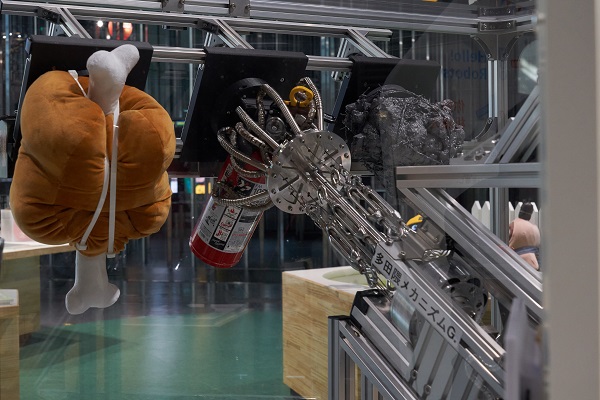
耐火性ソフトグリッパ機構
おわん型の半球を一直線に並べてワイヤーでつなぐと柔らかく自由に変形できる構造になります。ワイヤーを引っ張り、半球同士の摩擦力を大きくすると、形状を保ったまま固くなります。これを応用し、耐火性のチタンを用いることで、火災を含む災害時などの過酷な環境においても多様な物体をつかむことができるグリッパが誕生しました。
協力
多田隈 建二郎(東北大学 大学院情報科学研究科 准教授)
瞳は口ほどにものを言う!?
人をひきつけるロボットの魅力
「好奇心」ってなんだろう。瞳の働きを探求することで、その問いに迫ることができるかもしれません。人は興味があると瞳孔が大きくなりますが、瞳の動きや見かけの変化は、人同士でコミュニケーションをする際に重要な役割を果たしています。その動きや機能を機械的に再現することで、より魅力的で親しみを感じやすいロボットの開発が進んでいます。人のような瞳を持ったロボットなら、あなたも思わず見入ってしまうかもしれません。

Pupiloid(ピューピロイド)
Pupil(瞳)+ oid(ロボット)の名前のとおり、人の瞳のような見た目をしたロボットです。このロボットは人の会話の「熱量」(発話量)を計測していて、より熱心に話しかけるほど、瞳孔が大きくなります。瞳孔の変化があることによって、よりロボットに親しみを感じやすくなり、会話を促進させる効果が期待されています。
協力
瀬島 吉裕(関西大学 総合情報学部 教授)
つくってさぐる! 生物のヒミツ
動物を再現して理解する
自然界で生きていく上で、さまざまな機能を備える生物の身体は、複雑な未知のメカニズムを秘めています。生物のしなやかな身体機能を理解するためには生物そのものを観察・計測するだけでなく、生物の身体構造を模倣したロボットを用いて研究する試みも有効です。これにより、動物だけでは難しい様々な実験と検証が可能となり、その成果は生物学だけでなく、ロボットの制御や知能の発展に貢献することが期待されます。
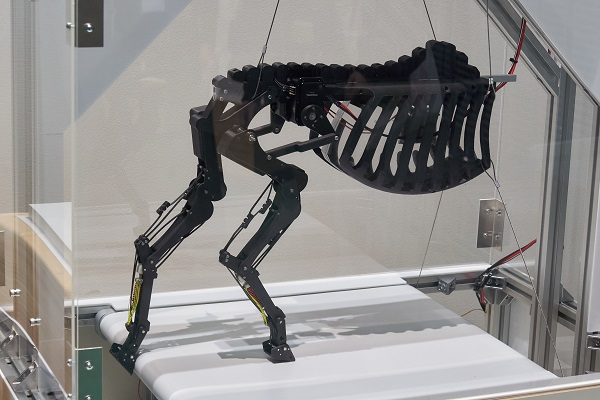
ウマ後肢型ロボット
ウマの歩行メカニズム解明のためのロボットです。ウマの後ろ脚1本に備わる5つの関節と6本の筋肉・腱の構造を再現すると、股関節をふるだけでウマそっくりに歩くことができました。股関節を前方に勢いよく振ると全ての関節が連動して曲がり、足先が地面に接すると関節が自動的に固定されて自重を支えることが可能です。
協力
増田 容一(大阪大学工学研究科 助教)
宮下 和大(大阪大学大学院工学研究科)
小林 有恒(大阪大学大学院工学研究科)
吉田 龍矢(大阪大学大学院工学研究科)
モノとあなたとロボットと
モノと人、ロボットと人の関係
ロボットが社会に導入されるにあたっては、導入される先にある社会やそこに住む人間の研究が重要です。ロボットというモノを人はどのようにしてとらえ、付き合っていけばよいのでしょうか。社会心理学的な視点からロボットと人との関係を考えてみると、科学技術に限らず、わたしたちの身の回りのモノとの関わり方が重要であることが見えてきます。
漫画『サイド-バイ-サイド』
未来のロボットと人はどんな関係になると思いますか。それを考えるためのキーワードは、「モノと人の相互作用(Human-Object Interaction)」です。人はモノを大切にし、そしてモノを扱うなかから何かを学んでいます。社会心理学者とともに考えられた物語をヒントに、ロボットと人の理想的な関係性を考えてみましょう。
協力
上出 寛子(京都大学大学院法学研究科・特定准教授)
イラスト・アニメーション
北村 みなみ
ロボット年代記
私たち人間は、どのようにロボットを生み出し、どのように関わってきたのでしょうか。実際に研究開発されたロボット技術や、ロボットが登場する物語を時代ごとに振り返ってみましょう。





閉じる
閉じる
閉じる
[クレジット] ※所属・肩書は展示オープン当時、敬称略
ハロー!ロボット
- 監修
- 茂木 強 (科学技術振興機構 研究開発戦略センター フェロー)
- 企画・制作
- 日本科学未来館
[プロジェクトマネージャー] 相川 直美
[ディレクター] 河野 美月
[企画・リサーチ] 岩澤 大地(科学コミュニケーター)
[企画・リサーチ] 佐野 広大(科学コミュニケーター)
[リサーチディレクター] 小澤 淳
[展示技術] 大橋 永治
[展示技術] 村石 拡保
[運営担当] 酒井 夕子
[運営担当] 岡崎 由美子
- 設計・制作施工
- 株式会社乃村工藝社
[マネージャー] 天野 晴香
[デザイナー] 鈴木 敦
[デザイナー] 堀越 さやか
[グラフィックデザイン] 芳賀 あき
[プランナー] 渡邉 創
[プランナー] 佐竹 和歌子
[施工管理] 才木 佑来
[施工管理] 渡辺 大也
- 空間製作施工
- [造作] 株式会社大和工芸
[映像音響機器] 株式会社光和
[電気] 株式会社エス・ケイ・ティー
- 展示グラフィック製作施工
- 株式会社アオヤマ・フォト・アート
- 点訳・点字製作
- 株式会社サカイ・シルクスクリーン
- 翻訳
- トライベクトル株式会社
- 展示検証協力
- 共用品ネット