The Mechanism Behind Natural Leg Movements
The key to acquiring human-like leg motion
Utilizing the surrounding environment, like gravity, to keep walking is called "passive walking". Typically, achieving stable two-legged walking in robots requires complex control systems. However, by incorporating the concept of passive walking, robots can walk naturally using simple mechanisms like pendulum motion and spring forces.
Because of its simplicity, this technology can be applied in various ways, such as developing walking assistance techniques with minimal user effort and creating robots that operate with minimal energy.
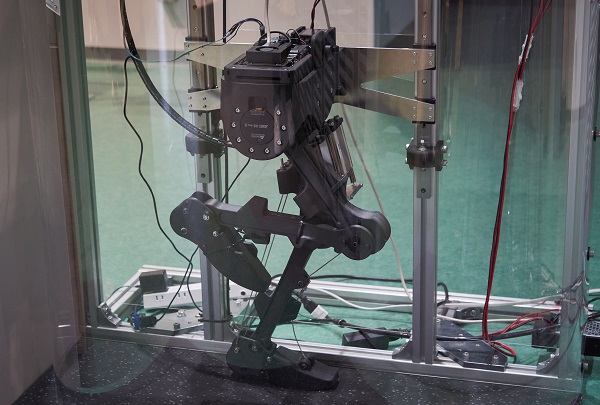
HopscotchBot
A bipedal robot with a structure based on the human body. The robot can rhythmically and smoothly jump on one leg by watching its own reflection in the mirror and practicing.
The natural movement of the robot has become possible by skillfully using a structural design based on 20 years of passive gait research, and integrating it with AI control.
In cooperation with
Sano Akihito (Professor, School of Engineering, Nagoya Institute of Technology),
Kamimura Tomoya (Assistant Professor, School of Engineering, Nagoya Institute of Technology)
Living with "Weak Robots"
The potential that "weakness" possesses
Imagine a trashcan robot that can't pick up trash on its own or a robot that forgets a story while telling it. These 'weak robots' can't achieve their goals independently. However, when these 'weak robots' are around people, it's hard for people to resist helping them, whether it's picking up the trash or teaching the robots the words they forgot. When we see robots with the 'ability' to prompt actions and conversations with people, it reminds us of our capacity to support one another.
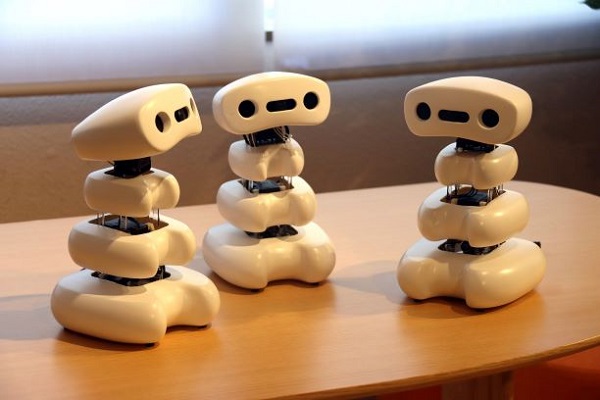
Talking-Bones
In response to the words uttered casually."Talking Bones" encourage conversation by showing interest and empathy regarding the events and experiences that happened during the day. By their follow-up questions, people might feel like talking more and feel comfortable and happy.
In cooperation with
Toyohashi University of Technology ICD-LAB (representative: Okada Michio, Professor)
Soft, Rigid, Soft…
Flexible "softness"
Unlike conventional robots which can only respond to certain situations, "soft robots" whichthat can flexibly function in various conditions and respond to various objects have gained attention. However, the robots cannot always be soft, and must be able to flexibly adapt their "softness/harness" to the situation to actually function, such as when grasping or moving an object.
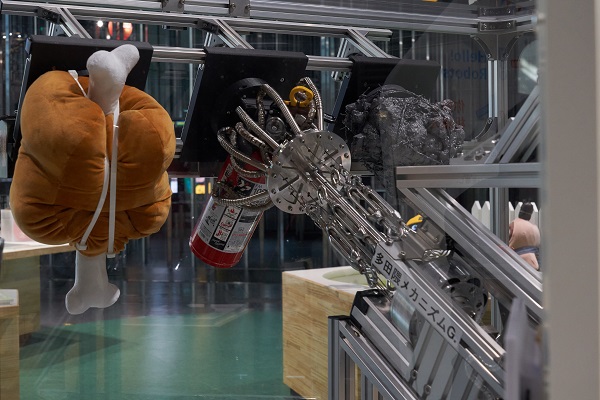
Fire resistant soft gripping mechanism
A soft and pliable structure is created by using bowl-shaped hemispheres which are aligned in a straight line and connected with a wire. When the wire is pulled, frictional force between the hemispheres increases, causing them to retain their shape. By applying this along with fire resistant titanium, grippers have been developed that can be used to grasp various objects, even in harsh environments, including fire disasters have been developed.
In cooperation with
Kenjiro Tadakuma (Associate Professor, Graduate School of Information Science, Tohoku University)
Eyes Speak Louder than Words!?
The charm of robots that attract people.
What is 'curiosity'? We can learn about it by looking at how our eyes work. When we're interested in something, our pupils get bigger. Our eyes are important in how we talk with each other. By mechanically replicating these movement and functions, advanced are being developed robots that are friendlier and more interesting to people. A robot with eyes like a person might make you want to look at it!

Pupiloid
Taken from "pupil" (eyes) + "oid" (robot), this robot has eyes that are human-like. This robot measures the “calorific value" (speech volume) of a person’s conversation, and the pupil enlarges when the person speaks to the robot more enthusiastically. The change in pupil dilation is expected to make people feel more comfortable with the robot, encouraging conversation.
In cooperation with
Sejima Yoshihiro (Professor, Faculty of Informatics, Kansai University)
Make and Search! Secrets of Living Creatures
Replicating and understanding animals
In the natural world, the bodies of living creatures come with various functions, holding complex and undiscovered mechanisms. To understand the flexible functions of living organisms, it's effective not only to observe and measure the organisms themselves but also to research using robots that mimic their body structures. This allows for a wide range of experiments and verifications that may be difficult with animals alone. The results of this research are expected to contribute not only to biology but also to the advancement of robot control and intelligence.
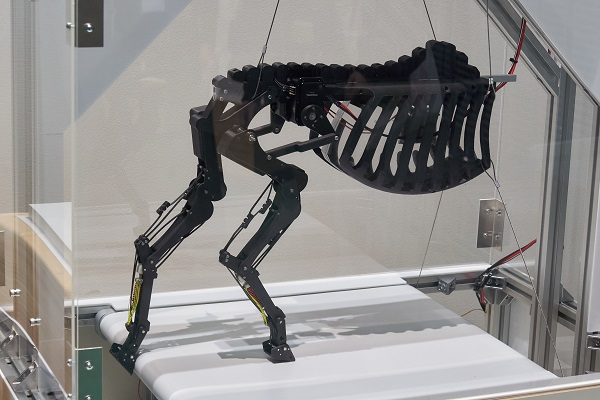
Horse hindlimb robot
This robot was created to understand the walking mechanism of horses, . By replicating the structure of a horse's leg, including five joints and six muscles and tendons in each leg, the robot was able to walk just like a real horse by just swinging the hip joint. When the hip joint swings vigorously forward, all the joints move in unison, and when the hoof touches the ground, the joints automatically lock to support the weight.
In cooperation with
Masuda Yoichi (Assistant Professor, Department of Mechanical Engineering, Osaka University)
Miyashita Kazuhiro (Department of Mechanical Engineering, Osaka University)
Kobayashi Aritsune (Department of Mechanical Engineering, Osaka University)
Yoshida Tatsuya (Department of Mechanical Engineering, Osaka University)
Objects, You, and Robots
Relationships between objects and humans, and between robots and humans
When introducing robots into society, it is crucial to research the society in which they are being introduced and the people who live there. How should people perceive and interact with robots as objects? Looking at the relationship between robots and humans from a social psychological perspective, we can see that our interactions with the objects in our daily lives, not just in the realm of science and technology, are essential.
Comic "Side-by-Side"
What do you think the relationship between people and robots will be like in the future? The keyword to think about this is "Human-Object Interaction". People valule objects, and learn something from handling them in turn. Let's consider the ideal relationship between people and robots with the help of stories created in collaboration with a social psychologist.
In cooperation with
Kamide Hiroko (Program-Specific Associate Professor, Graduate School of Law, Kyoto University)
Comic and animation
Kitamura Minami